
Disney Built a Walking Olaf Robot That Learned to Prevent Its Own Overheating

This is, perhaps, the coolest thing I’ve seen in AI all year: Disney Research has achieved something extraordinary: they've created a fully autonomous, freely walking robot version of Olaf, the beloved snowman from Frozen, solving problems no roboticist has faced before.
This isn't just a costume on wheels; it's a sophisticated piece of engineering that captures the character's distinctive personality and movement style while solving unprecedented technical challenges (paper).
I almost couldn't believe my eyes when I first saw this. This is an actual working robot that looks like a 3D animation IRL… it’s wild. (video)
The deets: The robot stands ~2 feet 11 inches, weights ~32.8 pounds and has 25 degrees of freedom. But the biggest challenge = Olaf's proportions violate every rule of stable robotics. The character's massive head, tiny body, and floating snowball feet required genuine mechanical innovation. His heavy head sits on a slim neck with small actuators underneath a heat-trapping costume. Recipe for disaster.
So what did they do? They built an AI that literally learned to manage its own temperature before melting down. Ironically, the hardest part of building a snowman robot is keeping it from overheating!
Here's how it works:
Some other cool innovations:
WHY IT MATTERS: First of all, theme parks are gonna be wild in a few years. Imagine life-like 3D characters wandering around the parks more frequently; how cool is that?
But this is bigger than robotic mascots; any machine with heat-sensitive components in tight spaces faces the same problems as Olaf here. We’re talking humanoid robots, prosthetics, drones, space applications…and Disney just proved you can teach AI to self-regulate their temperature through reward functions instead of hard-coded limits.
Now, let's dive into the details a bit more in depth.
Olaf presents unique problems for roboticists. His design violates basic principles of stable robotics:
Creating a believable physical version required innovations in both mechanical design and artificial intelligence.
The team's most clever trick was designing asymmetric legs hidden inside Olaf's lower snowball body:
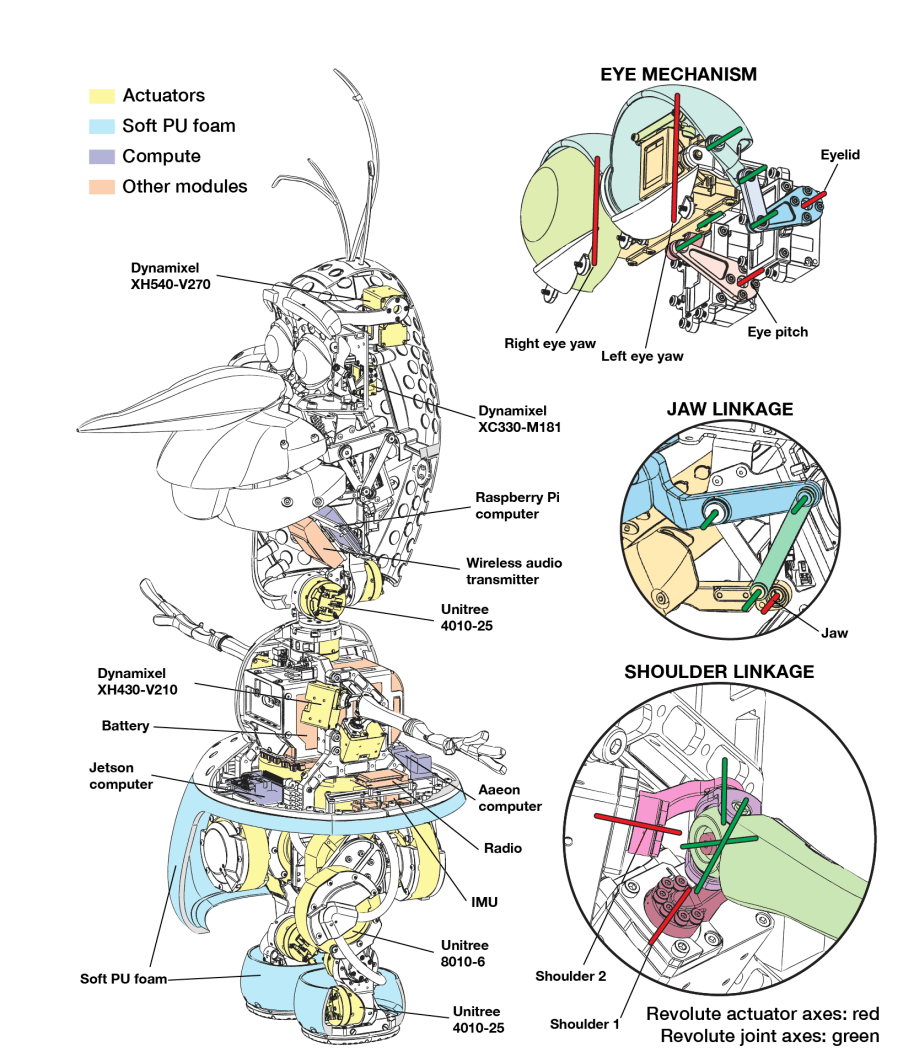
Space constraints meant actuators couldn't be placed directly at joints. Instead, the team used:
The stretchy 4-way fabric costume must accommodate all movements while maintaining Olaf's appearance. Magnetic attachments for the arms, nose, buttons, eyebrows, and hair allow them to break away during falls—preventing damage while enabling "in-character" gags.
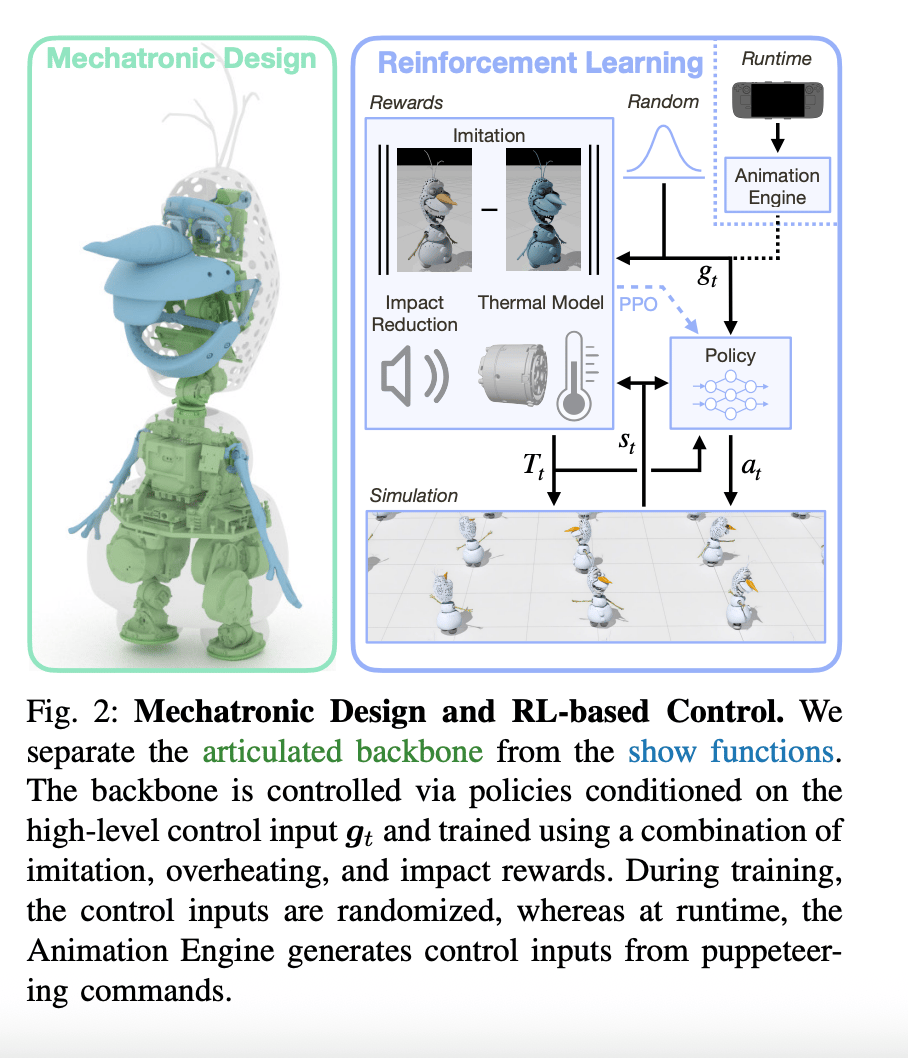
The control system uses reinforcement learning (RL) to master Olaf's distinctive movements:
Perhaps the most innovative feature: thermal-aware policies that prevent overheating.
The slim, costume-covered neck contains small actuators supporting the heavy head—a recipe for overheating. The solution:
This prevents shutdowns while maintaining the character's expressiveness—the robot literally learns to "pace itself."
Early versions had a problem: harsh robotic footsteps that shattered the illusion. The team introduced an impact reduction reward that:
The final robot achieves:
Olaf can be controlled live through a three-layer animation system:
This creates the illusion of a character that's both autonomous and responsive to puppeteering.
This project pushes robotics beyond traditional functional goals into the realm of believability and character fidelity. The innovations have applications beyond entertainment:
The team succeeded in creating something that's neither purely functional robot nor simple animatronic—it's a believable character that walks, gestures, and even "thinks" about not overheating, all while maintaining the warmth and charm that made audiences fall in love with Olaf in the first place.
More importantly, any machine with heat-sensitive components in tight spaces faces the same problem as Olaf—humanoid robots, prosthetics, drones, space applications. The techniques here—thermal-aware policies, impact reduction, compact linkages—transfer directly to consumer robotics and companions where character matters as much as capability. Disney just proved you can teach AI to self-regulate thermals through reward functions instead of hard-coded temperature limits, which can help give more powerful robots the ability to self regulate and in theory, work for longer.
Grant Harvey is the Lead Writer of The Neuron, where he continues to lead the publication's daily coverage of AI news, tools, and trends.

Don't fall behind on AI. Get the AI trends & tools you need to know. Join 700,000+ professionals from top companies like Microsoft, Apple, Salesforce and more.
Property of TechnologyAdvice. © 2026 TechnologyAdvice. All Rights Reserved
Advertiser Disclosure: Some of the products that appear on this site are from companies from which TechnologyAdvice receives compensation. This compensation may impact how and where products appear on this site including, for example, the order in which they appear. TechnologyAdvice does not include all companies or all types of products available in the marketplace.
